幾乎所有(yǒu)的管道流都(dou)是不穩定的(de),不論是層流(liu)狀态還☔是湍(tuān)✔️流狀态下都(dōu)存在各種幹(gan)擾。所謂脈動(dòng)流是指🧑🏾🤝🧑🏼流體(tǐ)在測量區域(yu)的👄流速是時(shí)間的函數,但(dan)在一個足💜夠(gou)長的時間段(duàn)内有一🚶♀️個恒(heng)定的平均值(zhí),這❤️個值決定(dìng)于脈動流的(de)流動規💜律。
真(zhen)正的管道定(ding)常流僅出現(xiàn)在層流中,大(da)多數工業管(guǎn)流均出現湍(tuān)流現象,試試(shì)一種統計意(yì)義上的定常(chang)流,脈動流會(huì)影響渦輪流(liu)量計 的測量(liang)精度,有時會(huì)使其測量值(zhi)嚴重失真,所(suo)以工業上🔴迫(po)切需㊙️要研究(jiu)脈動流對其(qi)測量精度的(de)影響☀️。
脈動無(wu)處無時不在(zai),但測量卻非(fei)常困難,我們(men)通常隻能測(cè)量出🚶♀️脈動的(de)主要參數,如(ru)輻值、頻率和(he)波形🏒,然後通(tōng)過這些參數(shu)分析♊脈動可(kě)能給流量計(ji)造成的影響(xiang)。
2.脈動流對渦(wō)輪流量計測(cè)量精度的影(yǐng)響
2.1特性方程(chéng)及計算
渦輪(lun)流量計以動(dong)量矩守恒定(dìng)理爲基礎的(de)一種速度式(shì)流量儀表,對(dui)非穩定流由(yóu)于轉子葉片(pian)和相關傳動(dong)裝置🐅的共振(zhen)、轉子的轉動(dòng)慣量、脈動的(de)形狀、轉子和(he)齒輪摩擦阻(zu)力及轉子瞬(shùn)時轉矩等因(yīn)素影響,使渦(wo)輪流量計産(chǎn)生很大的誤(wu)差,用機翼理(li)論來分析作(zuo)用在轉子上(shàng)的驅動力矩(jǔ)和阻力矩,可(kě)得到其😍運動(dong)方程:

式中J爲(wèi)葉片轉動慣(guàn)量,θ爲葉與軸(zhóu)線之間的夾(jiá)角,r爲渦輪葉(yè)👅片的平均半(bàn)徑,A爲管道流(liú)量面積,ρ爲流(liu)體密🈲度,ω爲渦(wō)輪的旋轉角(jiao)加速度,Q爲通(tong)過管道流量(liàng)。
若把脈動流(liu)表示爲Q=asin2πfpt,經過(guo)分析整理,可(kě)得出渦輪旋(xuan)轉角加📐速度(dù)與脈動流各(gè)參數的關系(xì):22

其中C爲穩态(tài)時的ω值。
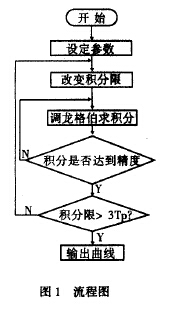
對特(te)定的渦輪流(liú)量計和不同(tóng)的脈動流,可(ke)編程計算出(chu)(2)式💁在脈動周(zhōu)圍内各離散(sàn)點所對應的(de)ω(t),據此計算可(ke)畫出ω(t)曲線,其(qí)流程圖如圖(tú)1:
2.2結構與分析(xi)
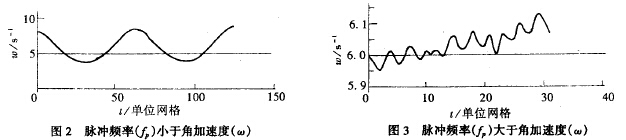
經過計算分(fen)析,發現導緻(zhi) 流量計 産生(sheng)誤差的主要(yào)因素是脈動(dong)流的頻率,所(suǒ)加的正❗弦🚶脈(mo)動流的🧑🏽🤝🧑🏻頻率(lü)與穩态下渦(wō)輪的旋轉角(jiao)加速度🔴的關(guan)系爲ω=2πfp(1/qm)r2時,相應(yīng)曲線與輸入(rù)正弦曲線最(zuì)爲接近,與理(li)論分析基本(běn)吻合,多次改(gai)變脈動流頻(pin)率、振幅參數(shu),發現有時圖(tu)形失真非常(chang)厲害,通過㊙️對(duì)多幅圖♍形的(de)比較,發⁉️現有(yǒu)如下規律:(見(jian)圖2、3)
|
3.結(jié)論
從以上分(fen)析計算可知(zhi),脈動流頻率(lü)對渦輪流量(liàng)計的測量精(jing)度影響最大(da),當脈動頻率(lü)fp小于旋轉角(jiǎo)加速度📐ω時,流(liu)量儀表的響(xiǎng)應曲線與輸(shu)入脈動曲線(xian)相似,測量結(jié)構接近于真(zhen)值;脈動振幅(fu)對渦輪流量(liàng)計的測量精(jing)度存在影響(xiǎng),但當脈動振(zhen)幅小🧑🏾🤝🧑🏼于某一(yi)振🌏幅值時,可(kě)認爲其不影(ying)響渦輪流量(liàng)計的精度;葉(yè)片轉動慣量(liàng)J和💞葉片的初(chū)始旋轉加速(su)度C也對渦輪(lún)流量計測量(liang)精度有💁影響(xiang)。
本文
智能渦(wō)街流量計
來(lai)源于網絡,如(ru)有侵權聯系(xi)删除轉載請(qǐng)注明出處!!!