聯系方式 |
| 電(dian)話(市場部): |
| |
| |
| (拓(tuò)展部): |
| 傳真: |
節(jiē)假日商務聯(lian)系電話:
何經(jing)理:
劉經理: |
| 郵(yóu)編:211600 |
| 網址:/ |
| http://banyunshe.cc/ |
| E-mail:[email protected] |
| [email protected] |
地址(zhǐ):江蘇省金湖(hu)縣工業園區(qū)環城西
路269号(hào) |
|
|
 |
您現在的位(wei)置 > 首頁 > 行業(yè)新聞 > 智能金(jīn)屬管浮子流(liu)量計的開發(fā) |
 |
|
|
|
智能金屬管(guǎn)浮子流量計(ji)的開發
發布(bu)時間:2025-12-12 |
引言
在(zài)工業生産和(he)科研測量中(zhong),經常遇到小(xiǎo)流量、低雷諾(nuò)數的流量測(ce)量。浮子流量(liang)計由于具有(yǒu)靈敏度高,測(ce)量範圍寬,壓(yā)力損失較小(xiǎo)且恒🈲定,測🆚量(liang)介💚質種類多(duo),工作可靠,維(wéi)護簡便,對儀(yí)表前直㊙️管段(duàn)要求㊙️不高等(děng)優點,已被廣(guang)泛應用。
浮子(zǐ)流量計的浮(fú)子位移與流(liu)量之間存在(zai)明确對應的(de)函數🌂關💁系,測(ce)出浮子位移(yí)即可确定流(liú)量大小。金屬(shǔ)管浮子流量(liàng)計(以下簡稱(chēng)流量計)可以(yi)連續測量封(fēng)閉管道内液(yè)體、氣體👅或💋蒸(zhēng)汽的流量,既(jì)能就地指示(shì),又能遠傳信(xìn)号,可實現流(liu)量測量值的(de)遠距離顯示(shì)、記錄、計算、調(diao)節控制等功(gong)能,因此廣泛(fan)應用于石油(yóu)、化工、能源、冶(yě)金、醫藥、輕工(gong)、國防等部門(men)的流量♊檢測(cè)及過程控制(zhì)。由于流量計(ji)的浮子位移(yi)不能直接讀(du)出🚶,所以将磁(cí)鋼🙇♀️封入浮子(zi)内🤞,由🏒設在轉(zhuǎn)換器内的磁(ci)藕合機構得(dé)到🏃🏻♂️浮子位移(yi),并由位移傳(chuan)感器将與流(liu)量對應的浮(fú)子位移轉換(huàn)成電信号,以(yi)實現遠傳輸(shū)出。目前常用(yòng)的位移傳感(gǎn)器有兩種:差(cha)🈲動變壓器式(shi)傳感器和電(diàn)容✔️式角位移(yi)傳感器。但是(shì)使用這兩種(zhǒng)位移傳感器(qì)要📞獲得與流(liú)量對應的位(wèi)移☁️信号,需要(yao)通過磁鋼藕(ou)合以及相應(yīng)的四連杆、凸(tu)輪✊等機械㊙️機(jī)構進行非線(xian)性💋修正和傳(chuán)動來實現,這(zhè)就會造成💋轉(zhuǎn)換💃器傳動環(huán)節多、結構複(fú)雜、存🈲在摩擦(cā)力、回差增大(da),從而降低流(liú)量計的測量(liàng)精度。因此無(wú)法實現流量(liang)計的轉換器(qì)全電子化、小(xiao)型化以及在(zai)此基礎上的(de)智能化。爲此(cǐ),推出采用霍(huo)爾👣傳感器檢(jian)測浮子位移(yi)、利用16位低功(gōng)耗單片機作(zuò)爲核心處理(li)器的智能流(liú)🈲量計。
2系統構(gou)成原理
該流(liu)量計采用線(xiàn)性霍爾傳感(gǎn)器檢測浮子(zi)位移,配合♈單(dan)片機應用系(xì)統,完全去掉(diao)了磁鋼禍合(he)、非線性修正(zhèng)及傳動等機(jī)械機構。其工(gong)作原理如圖(tu)1所示。
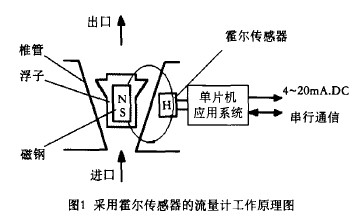
當被測(cè)流體自下而(er)上流過錐管(guan)時,浮子産生(shēng)位移,通過線(xiàn)性🚶♀️霍爾傳感(gan)器的磁力線(xiàn)角度就會發(fā)生變化,從而(er)使霍爾🚶♀️傳感(gan)器輸出相應(yīng)電壓。該輸出(chū)電壓輸入到(dào)單片機應用(yong)系統進行處(chù)理後,可輸出(chu)與流量對應(yīng)的标準電流(liu)信号,也可通(tong)過标準通信(xìn)接口🔆進行數(shù)據遠程交換(huan)。
在流量計的(de)轉換器中對(duì)應浮子位移(yí)範圍中間位(wei)置處🈲放置兩(liang)個特性一緻(zhi)的霍爾傳感(gǎn)器,兩個霍爾(er)🌂傳感器的磁(ci)敏感面互成(cheng)900。霍爾傳感器(qì)的輸出電壓(yā)🎯爲:
E1=K1·I1·B1·-sin θ
E2=K2·I2·B2·sin (90°-θ)
式中:
K1、K2爲霍(huò)爾靈敏度系(xi)數;
I1、I2爲霍爾元(yuán)件的激勵電(dian)流;
B1 、B2爲霍爾傳(chuán)感器所處位(wèi)置的磁感應(yīng)強度;
θ爲磁力(li)線相對于霍(huo)爾傳感器的(de)磁敏感面的(de)傾斜角。
因爲(wei)兩個霍爾傳(chuan)感器選用特(tè)性一緻的同(tong)一型号霍爾(ěr)傳感♌器,采用(yong)同一激勵電(diàn)流,處于同一(yi)高度位置,所(suo)以有K1= K2, I1= I2,B1= B2。因此❤️可(kě)得:
E1/ E2=sinθ/ sin (90°-θ)
=sinθ/cosθ=tgθ
0=arctg(E1/ E2)
可見,由E,, E2可(kě)求出磁力線(xiàn)的傾斜角。
由(yóu)圖1可見,随着(zhe)浮子上升,通(tōng)過霍爾傳感(gan)器的磁力線(xiàn)的角度順時(shí)針變化,因此(cǐ)求出傾斜角(jiǎo)θ就可以得出(chu)浮子的位移(yi)。
3單片機應用(yòng)系統硬件設(she)計
單片機應(yīng)用系統的原(yuan)理框圖如圖(tú)2所示。系統控(kòng)制器爲🌐一片(pian)🛀MSP430F149單片機。M SP430F149的主(zhu)要特性與功(gōng)能如下:
(1)超低(di)電流消耗:具(jù)有CPUOFF和OSCOFF模式,可(kě)在電壓降至(zhi)1.8V情況下工作(zuò)。
(2)基礎時鍾模(mó)塊:包括1個數(shu)控振蕩器(DCO)和(he)2個晶體振蕩(dàng)💚器。
(3)系統内置(zhi)模塊:LCD驅動器(qi)、A/D轉換器、1/O口、USART串(chuàn)口、看門狗、定(dìng)時器、硬件乘(chéng)法器、模拟比(bǐ)較器、EPROM等。
(4) 16位RISC結(jié)構,125as指令周期(qī),等待方式進(jin)行喚醒的時(shí)間爲61xso
(5)軟件可(ke)在RAM中運行。程(cheng)序可通過UART或(huò)測試引腳裝(zhuāng)入RAM,并👉能在🈲實(shí)時條件下運(yun)行。可降低試(shì)驗和調試的(de)開銷。
(6)僅3種指(zhǐ)令格式,全部(bù)爲正交結構(gòu),簡化了程序(xù)的開發。ROM讀☁️取(qǔ)、RAM存取、數據處(chu)理、I/O及其他外(wai)圍操作都使(shǐ)用公共指令(lìng),無特殊🔴指令(lìng)。
(7)系統工作穩(wen)定。上電複位(wèi)後,首先由DCOCLK啓(qi)動CPU,以保證程(cheng)序從正确的(de)位置開始執(zhí)行,保證晶體(ti)振蕩器有足(zu)夠的❄️起振及(ji)穩✔️定時間。如(rú)果晶體振蕩(dàng)器在用作CPU時(shí)鍾MCLK時發生故(gù)障,DCO會自動❌啓(qi)動,以保證系(xì)🏃♂️統正常工作(zuo);如果程序跑(pǎo)飛,看門狗可(kě)将其複位。
(8)具(ju)有高級語言(yan)編程能力,已(yǐ)開發了C一編(biān)譯器,支持㊙️JTAG仿(pang)真。
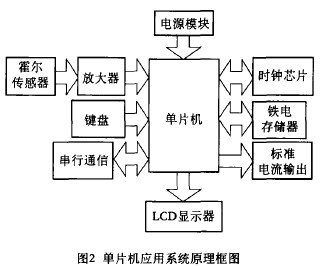
線性霍爾(ěr)傳感器将浮(fu)子位移轉換(huan)成電壓信号(hào),經放大器放(fàng)大後,由16位MCU進(jìn)行運算處理(li)和非線性修(xiū)正後求得流(liu)量值,一方面(miàn)送LCD顯示器顯(xian)示,另一方面(mian)送入DAC轉換成(chéng)模拟量,再經(jing)輸出轉換電(diàn)路轉換成标(biao)準電流信号(hao)輸出。另外,還(hai)可通過串行(hang)通信🔴接口RS485與(yu)上💛位機進行(háng)數據交換。
4軟(ruǎn)件設計
軟件(jiàn)的主流程圖(tú)如圖3所示。單(dan)片機在上電(diàn)和複位㊙️的🌈時(shi)候🙇♀️,先要執行(háng)初始化程序(xù)。然後,依次判(pan)斷功能模塊(kuai)的标志位🤩,當(dāng)标志位有效(xiao)時,執行該功(gong)能模塊的程(cheng)序,如标志♋位(wèi)無效🐕,則跳過(guò)向下執行。當(dang)程序執行到(dào)最後,再循環(huan)返回到初始(shi)🐕化之後。
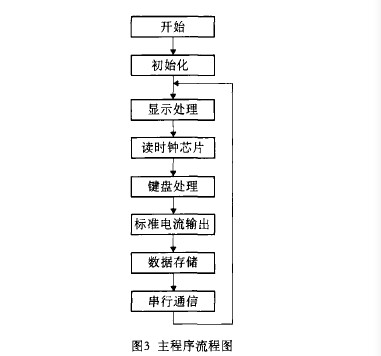
标準(zhun)電流輸出模(mó)塊和RS485串行通(tong)信模塊标志(zhì)位是由掃描(miáo)撥碼❗開關部(bù)分所決定的(de);數據存儲部(bu)分通過不斷(duàn)地讀取時鍾(zhong)芯片DS1307來判斷(duan)是否到了預(yù)先設定的存(cun)儲時間,到存(cun)儲時間後進(jìn)入數據存儲(chu)子程序。RS485通信(xin)實現了數據(jù)的遠程傳輸(shu),人們不必☂️直(zhi)接到現🙇🏻場去(qu)查看各❌種儀(yí)表的參數值(zhí),通過觀看通(tong)訊界面即可(ke)獲得當💋前和(he)曆史數據。
5結(jié)束語
由于采(cai)用霍爾傳感(gan)器進行位移(yí)檢測,使流量(liàng)計的轉換器(qi)不需要任何(he)可動的機械(xiè)零件,實現了(le)全電子化和(he)小型化,大大(dà)⚽降低了回差(chà);采用16位單片(piàn)機進行線性(xing)修正和運算(suàn),可使流量計(ji)的流量指示(shi)精确度由2.0級(ji)提高到1.0級。
由(you)以上分析可(ke)見,由于采用(yong)霍爾傳感器(qi)和16位單片機(jī),使流量計實(shí)現了小型化(huà)、數字化和智(zhi)能化,提高了(le)流量計的精(jīng)📧度,增加了流(liú)量計的功能(néng),并使得現場(chang)總線型的流(liú)量計成爲可(kě)能。
以上内容(rong)來源于網絡(luò),如有侵權請(qing)聯系即删除(chú)!
|
| |
|
|